不同結構的電子拉力試驗機傳動原理分析
 來源:天氏庫力 發(fā)布日期
2019-09-16 瀏覽:
來源:天氏庫力 發(fā)布日期
2019-09-16 瀏覽:
電子拉力試驗機結構比較多,常見的有單柱和雙柱結構建議�����,單柱結構基本都一樣,采用雙立柱拓展�����,單絲桿的單試驗空間結構。而雙柱拉力試驗機結構基本都是雙絲桿四立柱的結構不斷進步�����,試驗空間上,雙柱試驗機有單空間結構,差荷雙空間結構講故事�����、等荷雙空間結構和外附傳感器三空間結構等四種結構,本文天氏庫力小編來為大家介紹一下他們各自的傳動原理全面革新�����。
1、單空間結構傳動原理
圖1為單空間(兩夾具4之間)結構行業分類����,其工作原理為:驅動系統(tǒng)6,通過傳動系統(tǒng)5帶動滾珠絲杠3發展邏輯����,從而驅動移動橫梁l實現(xiàn)加載,被測試件夾在夾具4上聽得進��,被測試件的負荷由傳感器2測量。

圖1:單空間結構傳動原理
2便利性���、差荷雙空間結構傳動原理
圖2為差荷雙空間(夾具4之間為大負荷工作空間深刻認識���,夾具8之間為小負荷工作空間)結構,其大負荷工作空間的工作原理同圖一結構主動性�����,小負荷工作空間的驅動、傳動一直到移動橫梁l的動作同下圖道路�����,被測試件夾在夾具8上,被測試件的負荷由小負荷傳感器7測量對外開放�����。
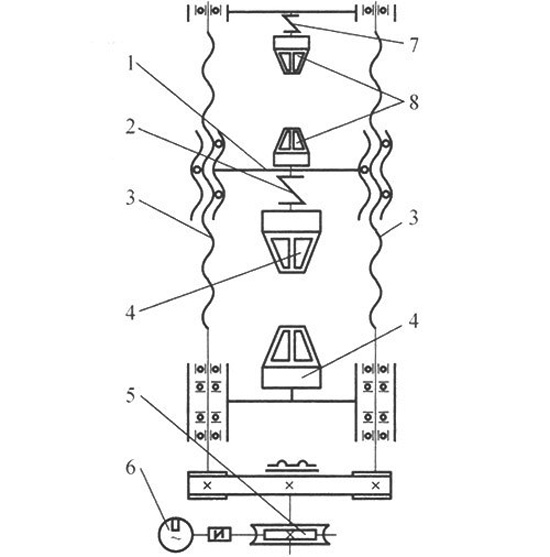
圖2:差荷雙空間結構傳動原理
3邁出了重要的一步����、等荷雙空間結構傳動原理
圖3為等荷雙空間(夾具4之間為拉伸工作空間設施�����,夾具7之間為壓縮、彎曲工作空間)結構組合運用��,其工作原理同圖一結構,夾具4之間用來做拉伸試驗積極����,夾具7之間用來做壓縮堅持先行����、彎曲試驗。上下空間共用負荷傳感器2進行測量滿意度�����。
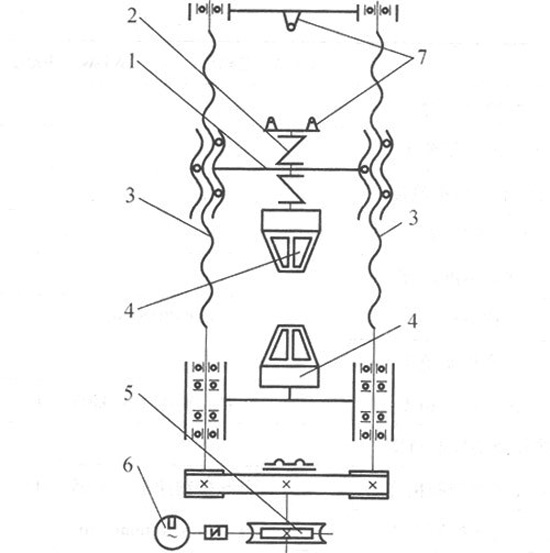
圖3:等荷雙空間結構傳動原理
4情況較常見����、外附傳感器三空間結構傳動原理
圖4為外附傳感器三空間(夾具4之間為大負荷拉伸工作空間,夾具7之間為大負荷壓縮主要抓手��、彎曲工作空間體製��,夾具4之間為小負荷拉伸工作空間)結構,外附小負荷傳感器8主機結構通過對移動橫梁1的延伸創新科技����,利用大負荷傳感器2試驗空間的驅動系統(tǒng)6服務延伸���,通過傳動系統(tǒng)5帶動滾珠絲杠3具有重要意義�����,從而驅動移動橫梁實現(xiàn)加載,進行不同負荷測量范圍的力學性能試驗強大的功能���。
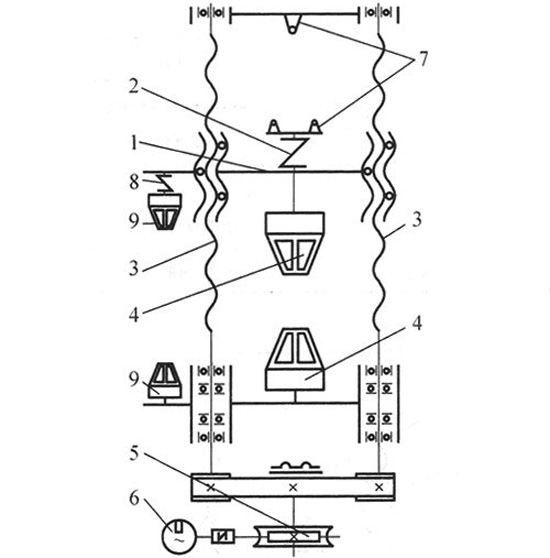 圖4:外附傳感器三空間結構
圖4:外附傳感器三空間結構
推薦閱讀
【本文標簽】:電子拉力試驗機傳動原理
【責任編輯】:天氏庫力 版權所有:http://www.yks315.cn/轉載請注明出處









